


Wind farm active power control system and method based on station-by-station adjustment
Wind farm active power control system and method based on station-by-station adjustment
Chengdu Forward Technology Co., Ltd. Ma Wei
[Abstract]]In order to solve the climate and energy problems, the progress of wind power technology has led to the birth of flexible tower wind turbines. In order to meet the power limitation requirements of power grid dispatching and avoid the batch vibration shutdown problem caused by the traditional adaptive active control method, an active control method based on station-by-station control is proposed to ensure the accuracy and stability of control and improve the utilization rate of wind energy.
【Key words]flexible tower unit-by-unit control wind turbine active control
1 Introduction
Climate and environmental issues and energy issues have always been two issues that we cannot ignore, and they are also two issues that affect each other. At present, the most widely used energy is still fossil energy. The combustion of fossil energy will make the climate environment worse. However, the development of society is inseparable from the good climate environment and the supply of energy. Based on this conflict and contradiction, new energy has gradually become the new favorite of the energy industry. At present, in the power industry, the form of power generation includes thermal power, hydropower, photovoltaic, wind power and nuclear power, among which wind power is the most environmentally friendly, so wind power is more and more valued by the state.
Wind power has just started in China, and the installed capacity of a single wind turbine generator is generally small. With the passage of time, its defects have gradually become prominent, such as low land utilization, unmaximized use of wind energy, and serious aging of units. In order to solve these problems, new wind turbines continue to appear, the blade diameter is lengthened, the tower height is increased, and the flexible tower appears.
The flexible tower is based on the wind shear effect, in order to capture the stronger and more stable wind resources at high altitude, and increase the height of the tower, and ultimately achieve the purpose of increasing power generation, while effectively reducing the use of steel, thereby reducing the overall weight of the tower. However, in the actual application process, the flexible tower has a fatal disadvantage-low resonance frequency. The traditional adaptive adjustment [1] method is to allocate the difference between the target active power and the actual active power of the wind farm according to the proportion of the active power margin of each wind turbine, this method will update the active power setting value (or generator speed setting value) of each unit when each active power adjustment period comes. If this adjustment method is applied to the wind turbine with flexible tower, when the active power setting value (or generator speed setting value) is set to the unique resonance area of the unit, the unit will actively stop to avoid the damage to the unit caused by long-term resonance, reaction to the entire wind field, there will be a large area of the field units out of the grid, active power drop, which will be very detrimental to the safety of the grid.
Based on the above analysis, this paper proposes a wind farm active power control system based on station-by-station control, and optimizes the control strategy to avoid the resonance zone of flexible tower units.
2 Function and Design of Active Power Control System for Wind Farm
The active power control system of wind farm is a system that converts the active power command of the power grid dispatching into the active power of each wind turbine. It can combine the characteristics of the wind turbine and the relevant instructions given by the power grid dispatching to maximize the use of wind energy and improve the economic benefits for the wind farm owners on the premise of meeting the requirements of the power grid dispatching. The overall design framework of the system is shown in Figure 2-1.
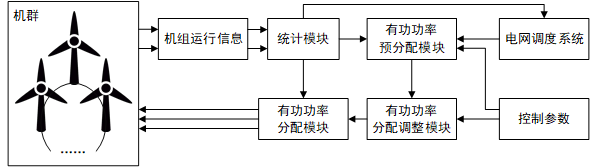
Figure 2-1 Overall design framework of the system
The active power control system of wind farm consists of statistical module, active power pre-distribution module, active power distribution adjustment module, active power distribution module and control parameter module. The system is integrated in the energy management system of the wind farm as a subsystem. The statistical module is used to collect the operation information of all wind turbines (such as active power, wind speed, unit status, active power set value, etc.), and do statistical operations to provide original data support for distribution, and upload relevant operation data to the power grid dispatching system to provide data basis for dispatching system control; the active power pre-distribution module estimates the power generation target of each wind turbine according to the target active control instruction issued by the power grid dispatching system and the actual active power generated by the current wind farm. The estimated result is adjusted by the active power distribution adjustment module based on control parameters (e. g. power regulation rate, upper and lower limits of active power of a single unit, etc.); The active power distribution module is used to distribute the distribution result to each wind turbine generator set, before issuing, the real-time data obtained from the statistics module will be used to check again. After confirmation, the unit will receive the latest control command, and the control of this cycle is completed.
In addition to collecting the operation data of the unit, the statistical module will also perform statistical operations on the data, such as: calculating the average wind speed of the whole field, the total active power of the whole field, the setting of the total active power of the whole field, the theoretical active power of the whole field, the difference between the power grid dispatching active command and the total active power of the whole field, the 1-minute change range of the total active power, and the 10-minute change range of the total active power.
The active power pre-distribution module is based on the active command of the power grid dispatch and the actual active power of the wind field, the amount that needs to be adjusted, and then traverses all the units, the optimal distribution object, and the amount that needs to be adjusted is attached to the optimal distribution object.
The main function of the active power distribution adjustment module is to adjust the additional adjustment amount on the optimal distribution object, and its adjustment basis is provided by the control parameters, such as: active adjustment rate, downtime interval, start-up interval, etc. When the pre-distribution result does not meet the control parameter requirements, the pre-distribution value will be revised twice, which can effectively avoid the wind field active change trend not meeting the grid scheduling requirements.
The active power distribution module distributes the adjusted distribution value to the unit. Before distribution, the validity of the data will be judged again, and after confirmation, the distribution action will be executed.
3 Key Technologies of Active Power Control for Wind Farm
In order to adapt to the operating characteristics of wind turbines with flexible towers, this paper proposes an active power distribution strategy for each unit control. The biggest difference between the so-called station-by-station control and adaptive control is that the adaptive control mode updates the assigned values of all units in each distribution cycle, while the station-by-station control mode updates the assigned values of only one unit in each distribution cycle. The algorithm flow is shown in Figure 3-1, where:
Ptarindicates that the target issued by the power grid dispatching system to the wind farm is active;
Pactindicates the actual total active power of the wind farm;
& Delta;P represents the difference between the target active power and the actual active power;
P0represents the active dead zone set by the control parameters;
Prem_1represents the active margin of Unit 1;
Pthr_1indicates the theoretical active power of Unit 1;
Pact_1indicates the actual active power of Unit 1;
Prem_maxrepresents the maximum value of active margin in all units;
Pact_maxindicates the maximum value of active power in all units;
Ppar_10minrepresents the 10-minute active power change of the control parameter setting;
P10minindicates the 10-minute change range of the total active power in the whole field;
Tcycindicates the time spent in one control cycle;
Plimrepresents the maximum variation of active power allowed in one control cycle;
Pset_xindicates the active setting value of the x th unit;
Pact_xindicates the actual active power of unit x.
The system states are divided into two states, namely, steady state and non-steady state. When the absolute value of the difference between the target active power and the actual total active power is less than or equal to the dead zone, it is called steady state; when the absolute value of the difference between the target active power and the actual total active power is greater than the dead zone, it is called non-steady state. The setting of the dead zone is to avoid some unnecessary control actions, and frequent control will increase the wear of the unit equipment. In the steady-state case, the algorithm does not need to carry out regulatory actions, only needs to continuously track the unit data changes, in the non-steady-state case, the algorithm needs to carry out regulatory actions, as far as possible to control the difference between the target active and the actual total active back to the dead zone range. There are many factors that cause non-steady state, such as the active power of the power grid dispatching system to change the target, strong wind speed fluctuations, and the shutdown of the wind turbine due to failure or other factors. The control action is divided into power-up action and power-down action. When the target active power is greater than the actual total active power, the power-up action is performed; when the target active power is less than the actual total active power, the power-down action is performed. Specific control methods are as follows:
(1) The difference between the target active power (Ptar) issued by the power grid dispatching system and the actual total active power (Pact) of the wind farm can be calculated, and & Delta;P can be obtained (Process 1, Process 2 and Process 3 in Figure 3-1);
(2) If the absolute value of the difference between the target active power and the actual total active power of the wind field (| & Delta;P |) is within the range of the control dead zone (P0)

Figure 3-1 Algorithm flow chart
the algorithm will directly return to the starting position to continuously monitor the data changes of the unit without the control action during internal operation; otherwise, the control action will be executed (as shown in the process 4 in figure 3-1);
(3) Before the algorithm regulates the unit, in order to avoid excessive active power change in the wind field, the maximum active power change (Plim) in this cycle needs to be calculated. The calculation method is to subtract the 10-minute active power change (Ppar_10min) of the control parameter from the actual 10-minute active power change (P10min) to obtain the maximum active power change in 10 minutes, which is then multiplied by the control cycle (Tcyc) and divided by 600, the maximum active power change (Plim) in this control cycle can be obtained (Process 5 in Figure 3-1);
(4) If the difference between the target active power and the actual active power (& Delta;P) is greater than 0, perform a power-up action. Before the action, it is necessary to calculate the difference between the theoretical and actual active power of each unit, that is, the active margin (Prem_N), and then get the maximum margin (Prem_max) by polling, and the corresponding unit x (as shown in Figure 3-1 process 6, process 7, process 8);
(5) If the maximum active power change (Plim) in this cycle is greater than the maximum margin value (Prem_max), the unit margin with the largest margin will be fully released, that is, the set active power setting value (Pset_x) of this unit will be set as the sum of the actual active power (Pact_x) and margin (Prem_max), and then all units will be polled again to obtain the new maximum margin value, when the maximum active power variation (Plim) of this cycle is less than the maximum unit margin value (Prem_max), set the set active power value (Pset_x) of the unit as the sum of the actual active power (Pact_x) and the maximum active power variation (Plim), end the control of this cycle, and return to the beginning part of the algorithm (Process 9, Process 10 and Process 11 in Figure 3-1);
(6) If the difference between the target active power and the actual active power (& Delta;P) is less than 0, a power reduction action is performed. Before taking action, it is necessary to poll the actual active power of each unit, and get the maximum actual active power (Pact_max) and the corresponding unit x (as shown in process 6 and process 12 in Figure 3-1);
(7) If the maximum active power change (Plim) in this cycle is greater than the actual maximum active power value (Pact_max), directly shut down the unit with the actual maximum active power, that is, set the set active power value (Pset_x) of this unit to 0, and then poll all units again to obtain the new actual maximum active power value, so as to circulate, until the maximum active power change (Plim) of this cycle is less than the actual maximum active power value (Pact_max) of the unit, set the set active power value (Pset_x) of the unit as the difference between the actual maximum active power value (Plim) and the maximum active power change (Pact_max), end the control of this cycle, and return to the beginning part of the algorithm (see Process 13, Process 14 and Process 15 in Figure 3-1-1).
4 Simulation Analysis
The simulation program simulates 167 wind turbines with a rated power of 1.5MW. In order to verify the correctness of the algorithm as much as possible, the wind speed interval simulates a variety of situations: small wind stage, wind stage, strong wind stage, and wind drop stage. According to the requirements of Q/GDW11273-2014 "Technical Specification for Automatic Control of Active Power of Wind Power" and Q/GDW1392-2015 "Technical Specification for Connecting Wind Farm to Power Grid", the installed capacity simulated by the simulation program reaches 250.5MW, so the active change of the wind farm cannot exceed 50MW within 10 minutes and 15MW within 1 minute.
The wind speed used in the simulation fluctuates back and forth between 3 m/s and 11 m/s (as shown in Figure 4-1), which is relatively close to the actual wind speed. During this period, power-up and power-down operations (as shown in Figure 4-2) are carried out respectively, covering the more typical active power output in the actual wind field, which is incomplete during small wind and the active power lifting rate exceeds the limit during wind rising, during strong winds, there are always problems such as exceeding the target.
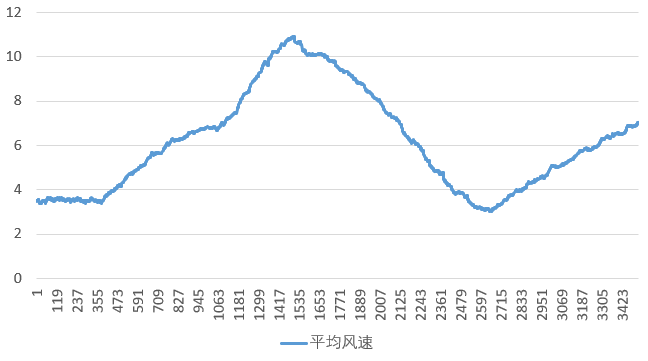
Fig. 4-1 Wind Speed Change
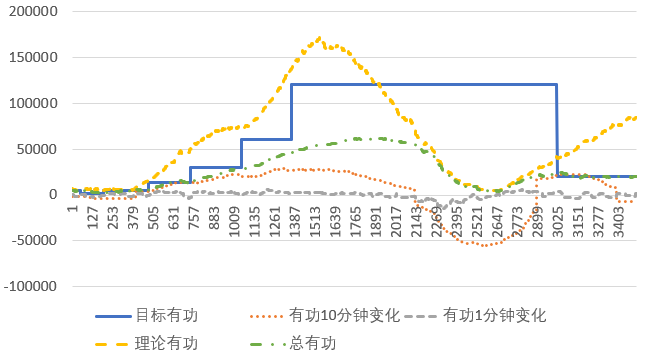
Fig. 4-2 Changes of Active Power
In the small wind stage (as shown in Figure 4-3,1-373 seconds), the target active power is reduced from 5kW to 2kW. It can be seen that the total active power reaches the target active power after 120 seconds and stabilizes at +/-200kW. During this period, the maximum value of active power change in 1 minute is 2.2MW and the maximum value of active power change in 10 minutes is 3.8MW. Then, at 196 seconds, the target active power increased from 2kW to 5kW, after 120 seconds, the steady state was reached again in 316 seconds and fluctuated within the target active power ± 800kW, during which the maximum value of active power change in 1 minute was 1.9MW and the maximum value of active power change in 10 minutes was 3.7MW. Comprehensive analysis shows that there is no problem of incomplete active power output, unstable control and over-limit of active power change rate during small wind.
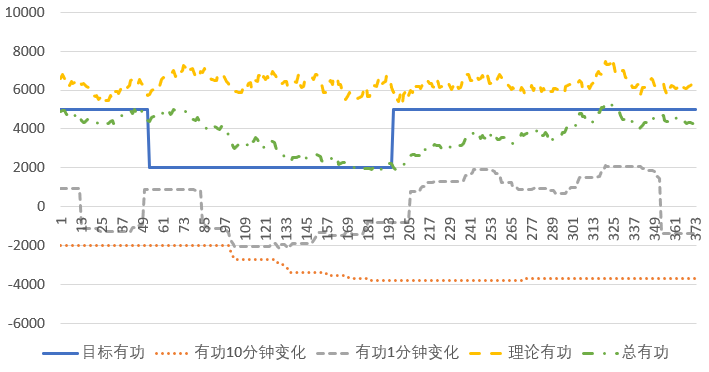
Fig. 4-3 Small Wind Stage
In the wind-raising phase (as shown in fig. 4-2,374-1366 seconds), the wind speed rises from 3.5 m/s to 10 m/s, during which the target active power rises from 5kW to 120MW in 4 times, with the maximum value of active power change in 10 minutes being 28.7MW and the maximum value of active power change in 1 minute being 6MW. From the data, it can be seen that the total active power rise is relatively stable, and there is no problem of overshoot or rate overrun.
In the strong wind phase (as shown in Figure 4-2,1367-1682 seconds), the wind speed is maintained above 10 m/s, and the target active power does not change during the period. The maximum value of active power change in 10 minutes is 28.4MW, and the maximum value of active power change in 1 minute is 3.4MW. The total active power is still in an upward trend because it has not reached the target active power. The rising speed is limited by the control parameters to the rate limit, and there is no problem of excessive active power fluctuation and unstable rising rate.
In the wind drop phase (as shown in Figure 4-2,1683-2647 seconds), the wind speed drops from 10 m/s to 3 m/s, and the target active power remains unchanged during the period. From the data, it can be seen that the total active power drop rate is less than the wind speed drop rate. This phenomenon is that the algorithm tracks the current active power of the unit, and on the premise of generating as much power as possible, to avoid the problem of overrun of active rate caused by excessive wind drop to the maximum extent, and also to avoid the problem of overrun of active rate caused by the next wind.
On the other hand, through the unit control records show that the algorithm only adjusts 1-5 units in each control cycle, and in the short term, it will not repeat the adjustment of a unit, so as to achieve the purpose of less movement of the unit. The feasibility, reliability, accuracy and stability of the station-by-station control mode are fully verified (as shown in Table 4-1).
Table 4-1 Part of Unit Regulation Record
| time | action | Unit serial number | Current Active | Active setting |
| 2021/12/2 9:52:21 | drop | 82 | 1126 | 609 |
| 2021/12/2 9:52:31 | drop | 153 | 1219 | 669 |
| 2021/12/2 9:52:41 | drop | 144 | 1268 | 691 |
| 2021/12/2 9:52:51 | drop | 117 | 1308 | 688 |
| 2021/12/2 9:53:01 | drop | 118 | 1243 | 556 |
| 2021/12/2 9:53:11 | drop | 161 | 1113 | 377 |
| 2021/12/2 9:53:21 | drop | 38 | 1108 | 339 |
| 2021/12/2 9:53:31 | drop | 26 | 1109 | 314 |
5 Conclusion
This paper studies a set of wind farm active power control system and method based on station-by-station control, and verifies its reliability in small wind stage, wind rising stage, strong wind stage and wind drop stage through simulation data. According to the data analysis, it is found that the 10-minute change of active power, the 1-minute change of active power, the difference between target active power and total active power and other indicators can meet the requirements, realizing the orderly adjustment of wind farm active power, the loss of electricity from abandoned wind is reduced, and the conversion efficiency of wind power is greatly improved.
6 References
[1] Yang Binyuan and Ma Wei's "Active Power Control System and Method for Wind Farm Based on Adaptive Adjustment Controller" 2018-6 was published in "Proceedings of the 5th China Wind Power Post-Market Symposium"
[2] Hu Kaikai, Zhai Dayong, "Active Power Distribution Strategy for Wind Farms and Its Implementation", 2013-3, published in "Power Transformation Technology"
[3] Chen Ning, Yu Jelai "Active Power Dispatch and Control of Wind Power System Based on Electrical Subdivision Information" 2008-4 Published in Chinese Journal of Electrical Engineering
[4] She Shensi, Zeng Xu, "Overview of Active Power Control in Wind Farms", published in Equipment Machinery on March 2013
About the author:Ma Wei (1987-), male, engineer, mainly engaged in the design and development of wind power monitoring system and energy control system, Chengdu, 610000.